Algorithmes, voyageur de commerce, distance d’édition¶
Voyageur de commerce¶
[1]:
import numpy as np
import matplotlib.pyplot as plt
villes = np.random.rand(20, 2)
villes[:5]
[1]:
array([[0.41511992, 0.25980581],
[0.28882207, 0.18110005],
[0.43436194, 0.89716744],
[0.51101688, 0.41073324],
[0.73591566, 0.73214563]])
[2]:
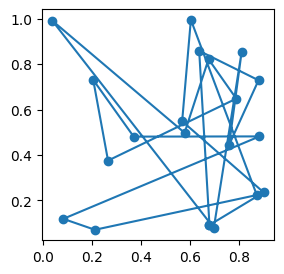
fig, ax = plt.subplots(1, 1, figsize=(3, 3))
indices = list(range(-1, villes.shape[0]))
ax.plot(villes[indices, 0], villes[indices, 1], "o-")
[2]:
[<matplotlib.lines.Line2D at 0x79588b67de80>]
[3]:
def distance(v1, v2): # v1= np.array([0, 1]), v2= ....
return ((v1 - v2) ** 2).sum() ** 0.5
def plus_proche_non_visitee(villes, chemin):
depart = chemin[-1]
dmin, imin = None, None
for i in range(villes.shape[0]):
if i not in chemin:
d = distance(villes[depart], villes[i])
if dmin is None or d < dmin:
dmin, imin = d, i
return imin
def algo_proche_en_proche(villes):
chemin = [0]
while len(chemin) < villes.shape[0]:
# trouver la ville la plus proche non visitée de la dernière
# ville visitée et l'ajouter au chemin
inext = plus_proche_non_visitee(villes, chemin)
chemin.append(inext)
return chemin
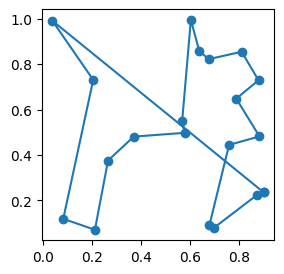
chemin = algo_proche_en_proche(villes)
indices = chemin + chemin[:1]
fig, ax = plt.subplots(1, 1, figsize=(3, 3))
ax.plot(villes[indices, 0], villes[indices, 1], "o-")
[3]:
[<matplotlib.lines.Line2D at 0x79588b2b2a50>]
[4]:
def elimine_croisements(villes, chemin):
n_iteration = 0
C = chemin
while n_iteration < 10 + villes.shape[0]:
n_iteration += 1 # pour éviter une boucle infini
mieux = 0
for i in range(-1, villes.shape[0]):
for j in range(i + 2, villes.shape[0] - 1):
delta = (
-distance(villes[C[i]], villes[C[i + 1]])
- distance(villes[C[j]], villes[C[j + 1]])
+ distance(villes[C[i]], villes[C[j]])
+ distance(villes[C[i + 1]], villes[C[j + 1]])
)
if delta < 0:
mieux += 1
print("mieux", i, j, delta, chemin[i + 1 : j + 1], chemin[j:i:-1])
# c'est mieux... on retourne les villes du chemin
# entre i+1 et j inclus
if i >= 0:
chemin[i + 1 : j + 1] = chemin[j:i:-1]
else:
chemin[i + 1 : j + 1] = chemin[j::-1]
if mieux == 0:
break
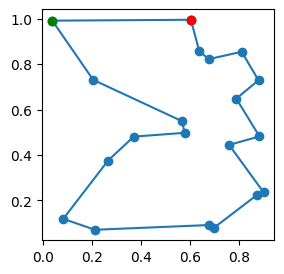
elimine_croisements(villes, chemin)
fig, ax = plt.subplots(1, 1, figsize=(3, 3))
indices = chemin + chemin[:1]
ax.plot(villes[indices, 0], villes[indices, 1], "o-")
ax.plot(villes[chemin[:1], 0], villes[chemin[:1], 1], "or")
ax.plot(villes[chemin[-1:], 0], villes[chemin[-1:], 1], "og")
mieux -1 2 -0.015414159550566658 [0, 11, 1] []
mieux 3 5 -0.034186569174776416 [13, 3] [3, 13]
mieux 6 14 -0.053147377441806753 [4, 16, 2, 9, 12, 14, 17, 7] [7, 17, 14, 12, 9, 2, 16, 4]
mieux 7 9 -0.01748283747037216 [17, 14] [14, 17]
mieux 13 15 -0.19987294649097015 [4, 19] [19, 4]
mieux 2 4 -0.0075636338480231935 [10, 3] [3, 10]
mieux 6 9 -0.2253313144570693 [7, 14, 17] [17, 14, 7]
mieux 8 10 -0.14891254917547306 [7, 12] [12, 7]
mieux 3 6 -0.0478332555189685 [10, 13, 15] [15, 13, 10]
[4]:
[<matplotlib.lines.Line2D at 0x79588b355be0>]
Distance d’édition¶
[5]:
def distance_edition(m1, m2):
cout = np.empty((len(m1) + 1, len(m2) + 1))
predi = np.empty((len(m1) + 1, len(m2) + 1), dtype=np.int64)
predj = np.empty((len(m1) + 1, len(m2) + 1), dtype=np.int64)
cout[:, 0] = np.arange(len(m1) + 1)
cout[0, :] = np.arange(len(m2) + 1)
predi[:, 0] = np.arange(len(m1) + 1) - 1
predj[:, 0] = 0
predi[0, :] = 0
predj[0, :] = np.arange(len(m2) + 1) - 1
for i in range(1, len(m1) + 1):
for j in range(1, len(m2) + 1):
c_sup = cout[i - 1, j] + 1
c_ins = cout[i, j - 1] + 1
c_cmp = cout[i - 1, j - 1] + (1 if m1[i - 1] != m2[j - 1] else 0)
if c_cmp <= min(c_sup, c_ins):
cout[i, j], predi[i, j], predj[i, j] = c_cmp, i - 1, j - 1
elif c_sup <= c_ins:
cout[i, j], predi[i, j], predj[i, j] = c_sup, i - 1, j
else:
cout[i, j], predi[i, j], predj[i, j] = c_ins, i, j - 1
# alignement
alignement = [(len(m1), len(m2))]
while min(alignement[-1]) >= 0:
i, j = alignement[-1]
i, j = predi[i, j], predj[i, j]
alignement.append((i, j))
alignement = alignement[::-1][2:]
lettres = [(m1[i - 1], m2[j - 1]) for i, j in alignement]
return cout, alignement, lettres
cout, alignement, lettres = distance_edition("ENSAE", "ESANE")
print(alignement)
print(lettres)
cout
[(np.int64(1), np.int64(1)), (np.int64(2), np.int64(1)), (np.int64(3), np.int64(2)), (np.int64(4), np.int64(3)), (np.int64(4), np.int64(4)), (5, 5)]
[('E', 'E'), ('N', 'E'), ('S', 'S'), ('A', 'A'), ('A', 'N'), ('E', 'E')]
[5]:
array([[0., 1., 2., 3., 4., 5.],
[1., 0., 1., 2., 3., 4.],
[2., 1., 1., 2., 2., 3.],
[3., 2., 1., 2., 3., 3.],
[4., 3., 2., 1., 2., 3.],
[5., 4., 3., 2., 2., 2.]])
[ ]: