Régression linéaire par morceaux¶
La régression linéaire par morceaux a l’avantage de produire un modèle localement interprétable. Mais ce n’est pas évident d’estimer un tel modèle quand on ne connaît pas les morceaux par avance.
[1]:
%matplotlib inline
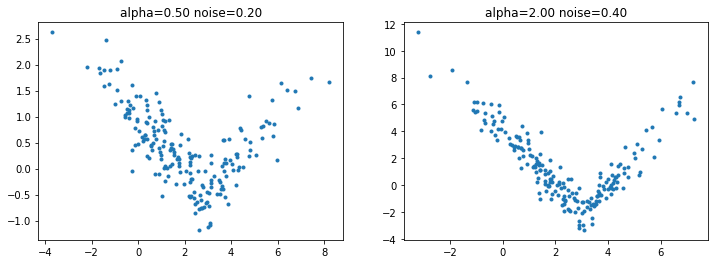
Des données artificielles¶
[2]:
from numpy.random import normal
import numpy
import matplotlib.pyplot as plt
def nuage(n, alpha, noise=0.2):
eps = normal(0, 2, (n, 2))
X = eps[:, 0] + 2
X1 = eps[:, 0].copy()
X2 = eps[:, 0].copy()
th = 1.0
X1[th >= X1] = 0
X2[th < X2] = 0
sel = numpy.zeros((n,))
sel[th < X1] = 1
Y = X1 * alpha - X2 * alpha + eps[:, 1] * noise - sel * alpha * th * 2
return X, Y
fig, ax = plt.subplots(1, 2, figsize=(12, 4))
alpha, noise = 0.5, 0.2
X, Y = nuage(200, alpha)
ax[0].plot(X, Y, ".")
ax[0].set_title("alpha=%1.2f noise=%1.2f" % (alpha, noise))
alpha, noise = 2.0, 0.4
X, Y = nuage(200, alpha, noise=0.4)
ax[1].plot(X, Y, ".")
ax[1].set_title("alpha=%1.2f noise=%1.2f" % (alpha, noise));
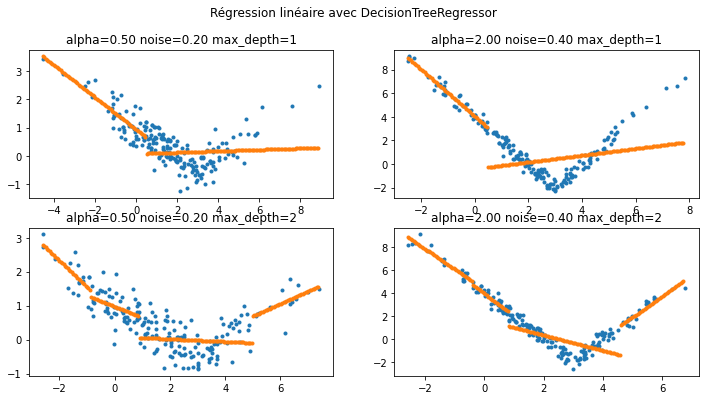
Quelques exemples avec un arbre de décision¶
La segmentation est réalisée d’abord avec un arbre de décision dont on fixe la profondeur. Chaque segment est choisi de telle sorte à minimiser l’approximation de la fonction par une constante sur chaque segment.
[3]:
from mlinsights.mlmodel import PiecewiseRegressor
from sklearn.tree import DecisionTreeRegressor
def nuage_piecewise(n, alpha, noise=0.2, max_depth=1):
X, Y = nuage(n, alpha, noise=noise)
clr = PiecewiseRegressor(binner=DecisionTreeRegressor(max_depth=max_depth))
Xm = X.reshape((len(X), 1))
clr.fit(Xm, Y)
mi, ma = X.min(), X.max()
Xm = numpy.arange(0, 200) * (ma - mi) / 200 + mi
Xm = Xm.reshape((len(Xm), 1))
return X, Y, Xm, clr.predict(Xm)
def plot(i, j, alpha, noise, max_depth, ax):
X, Y, XX, Z = nuage_piecewise(200, alpha, max_depth=max_depth)
ax[i, j].plot(X, Y, ".")
ax[i, j].plot(XX, Z, ".")
ax[i, j].set_title(
"alpha=%1.2f noise=%1.2f max_depth=%d" % (alpha, noise, max_depth)
)
fig, ax = plt.subplots(2, 2, figsize=(12, 6))
alpha, noise, max_depth = 0.5, 0.2, 1
plot(0, 0, alpha, noise, max_depth, ax)
alpha, noise, max_depth = 2.0, 0.4, 1
plot(0, 1, alpha, noise, max_depth, ax)
alpha, noise, max_depth = 0.5, 0.2, 2
plot(1, 0, alpha, noise, max_depth, ax)
alpha, noise, max_depth = 2.0, 0.4, 2
plot(1, 1, alpha, noise, max_depth, ax)
plt.suptitle("Régression linéaire avec DecisionTreeRegressor");
Quelques exemples avec un KBinsDiscretizer¶
[4]:
from sklearn.preprocessing import KBinsDiscretizer
def nuage_piecewise2(n, alpha, noise=0.2, n_bins=2):
X, Y = nuage(n, alpha, noise=noise)
clr = PiecewiseRegressor(binner=KBinsDiscretizer(n_bins=n_bins))
Xm = X.reshape((len(X), 1))
clr.fit(Xm, Y)
mi, ma = X.min(), X.max()
Xm = numpy.arange(0, 200) * (ma - mi) / 200 + mi
Xm = Xm.reshape((len(Xm), 1))
return X, Y, Xm, clr.predict(Xm)
def plot2(i, j, alpha, noise, n_bins, ax):
X, Y, XX, Z = nuage_piecewise2(200, alpha, n_bins=n_bins)
ax[i, j].plot(X, Y, ".")
ax[i, j].plot(XX, Z, ".")
ax[i, j].set_title("alpha=%1.2f noise=%1.2f n_bins=%d" % (alpha, noise, n_bins))
fig, ax = plt.subplots(2, 2, figsize=(12, 6))
alpha, noise, n_bins = 0.5, 0.2, 2
plot2(0, 0, alpha, noise, n_bins, ax)
alpha, noise, n_bins = 2.0, 0.4, 2
plot2(0, 1, alpha, noise, n_bins, ax)
alpha, noise, n_bins = 0.5, 0.2, 4
plot2(1, 0, alpha, noise, n_bins, ax)
alpha, noise, n_bins = 2.0, 0.4, 4
plot2(1, 1, alpha, noise, n_bins, ax)
plt.suptitle("Régression linéaire avec KBinsDiscretizer");
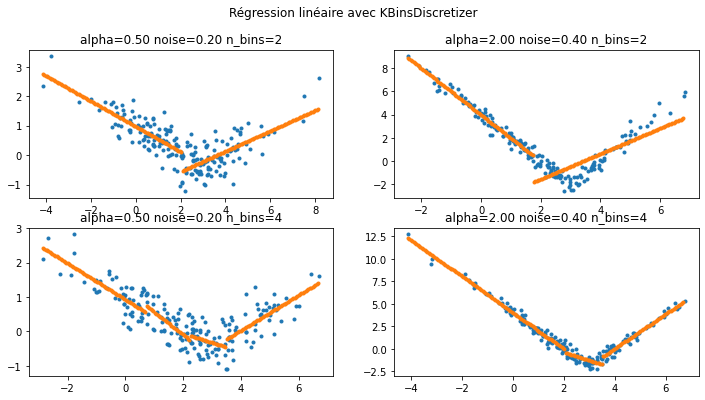
C’est mieux mais ce n’est pas parfait. La classe KBinsDiscretizer fonctionne simplement en segmentant les données mais elle ne tient pas compte de la cible.
Arbre de décision optimisé pour la régression linéaire¶
L’arbre suivant reprend l’algorithme de l’arbre de décision à ceci près qu’il optimise un critère MSE en approximant le nuage de points  par une fonction linéaire
par une fonction linéaire  . Il faut néanmoins augmenter le nombre de points par feuille pour éviter quelques artefacts.
. Il faut néanmoins augmenter le nombre de points par feuille pour éviter quelques artefacts.
[5]:
from mlinsights.mlmodel.piecewise_tree_regression import PiecewiseTreeRegressor
def nuage_piecewise3(n, alpha, noise=0.2, min_samples_leaf=30):
X, Y = nuage(n, alpha, noise=noise)
clr = PiecewiseTreeRegressor(criterion="mselin", min_samples_leaf=min_samples_leaf)
Xm = X.reshape((len(X), 1))
clr.fit(Xm, Y)
mi, ma = X.min(), X.max()
Xm = numpy.arange(0, 200) * (ma - mi) / 200 + mi
Xm = Xm.reshape((len(Xm), 1))
return X, Y, Xm, clr.predict(Xm)
def plot3(i, j, alpha, noise, min_samples_leaf, ax):
X, Y, XX, Z = nuage_piecewise3(200, alpha, min_samples_leaf=min_samples_leaf)
ax[i, j].plot(X, Y, ".")
ax[i, j].plot(XX, Z, ".")
ax[i, j].set_title(
"alpha=%1.2f noise=%1.2f min_samples_leaf=%d" % (alpha, noise, min_samples_leaf)
)
fig, ax = plt.subplots(2, 2, figsize=(12, 6))
alpha, noise, min_samples_leaf = 0.5, 0.2, 40
plot3(0, 0, alpha, noise, min_samples_leaf, ax)
alpha, noise, min_samples_leaf = 2.0, 0.4, 40
plot3(0, 1, alpha, noise, min_samples_leaf, ax)
alpha, noise, min_samples_leaf = 0.5, 0.2, 30
plot3(1, 0, alpha, noise, min_samples_leaf, ax)
alpha, noise, min_samples_leaf = 2.0, 0.4, 30
plot3(1, 1, alpha, noise, min_samples_leaf, ax)
plt.suptitle("Arbre de décision optimisé\npour la régression linéaire par morceaux");
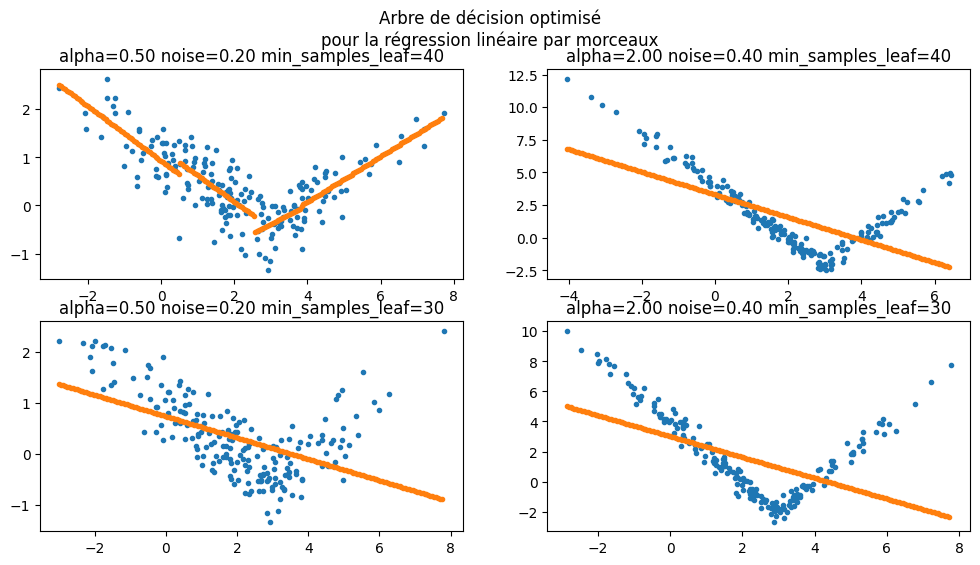
Il faudrait ajouter des contraintes de continuité.
[7]: